I build autonomous robotic systems end to end — from data-driven perception and planning to simulation, systems integration, and real-world deployment.
My work spans UAVs, AMRs, and multi-robot systems, with hands-on experience using ROS2, PX4/ArduPilot, and modern computer vision and machine learning techniques.
Recently, I’ve worked as a Robotics Engineer (GROWTTH) at Freudenberg NOK Sealing Technologies, a Robotics AI R&D Intern with the UPS Advanced Technology Group, and a Systems Engineering Intern at DroneUp.
At Georgia Tech, I contributed to building a remotely accessible quadrotor swarm testbed in the Robotarium.
I’m currently exploring early-career roles in robotics, autonomy, and applied AI, and I enjoy collaborating on problems that bridge machine learning and real-world robotic systems.
If you’d like to connect or chat, feel free to reach out.
Built an end-to-end autonomous UAV surveillance system for anti-poaching in forest environments, spanning hardware design, autonomy, perception, simulation, and field testing. Selected and integrated the complete UAV platform (frame, motors/ESCs, battery, Pixhawk, GPS, onboard compute, and sensors) and implemented autonomous navigation in ArduPilot GUIDED mode with reactive obstacle avoidance using fused stereo-vision and ultrasonic sensing for robust traversal under forest cover. Validated autonomy behaviors in a Dockerized Gazebo simulation using ArduPilot-SITL and conducted real-world field tests on custom-built quadrotor and hexarotor platforms with Raspberry Pi 4 onboard compute and DroneKit/MAVLink communication. Trained a YOLOv5 model for human and wildlife detection, achieving mAP 0.914 and F1 score 0.88 on a labeled dataset, and simulated a wireless sensor network in MATLAB to visualize event routing from triggered nodes to a base station.
ROS • ArduPilot • Gazebo Sim • Stereo Vision • YOLO •Embedded Systems • Systems Integration
Navigation using Computer Vision and Support Vector Machines for Autonomous Mobile Robots Pranay Mathur, Yash Srivastava
Guide: Dr Sean Wilson
Designed and Implemented a state machine based algorithm for navigating to a defined goal in a GPS-denied environment for Differential Drive Autonomous Mobile Robots running ROS2. Used Computer Vision and Support Vector Machines for building a real-time road sign classifier for driving towards the goal.
Built a remotely accessible quadrotor swarm testbed using Crazyflie and ROS2 at the Georgia Tech Robotarium, leveraging a VICON motion capture system for precise real-time pose estimation. Designed an FSM-based experiment pipeline with Automated Charging and implemented Barrier Certificates to guarantee collision-free operation via minimally invasive trajectory modification.
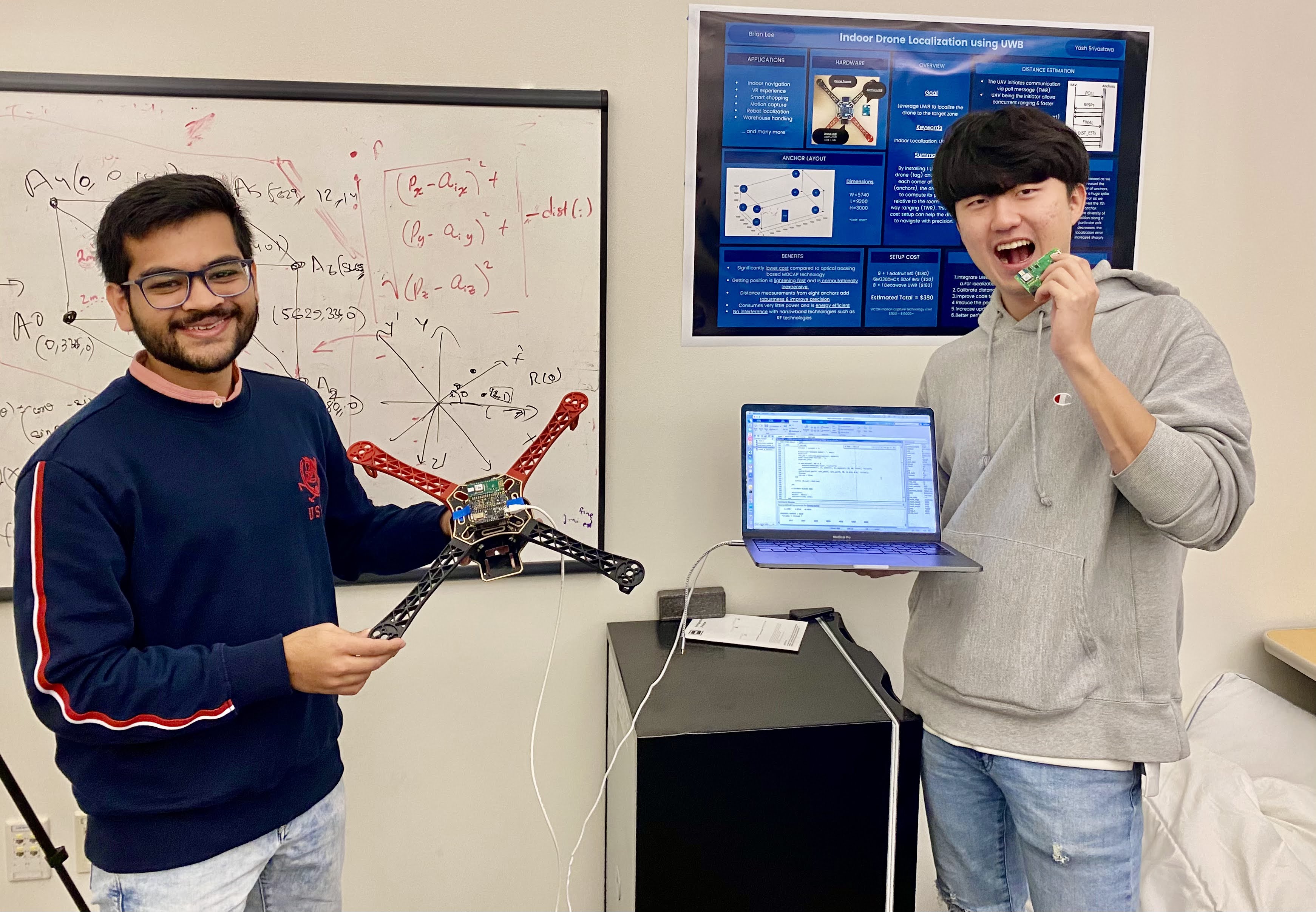
Developed a low-cost indoor localization system using Ultra-Wideband (UWB) and Embedded C++ on Adafruit M0 boards. Extended the Two-Way Ranging protocol to synchronize 8 UWB beacons, achieving centimeter-level XY localization with a 94% average packet response rate and an 8 Hz update rate.
UWB • Wireless • IoT • Embedded C++ • Communication Protocols
Designed and implemented a leader–follower distributed control strategy for multi-rotor UAV swarms, enabling real-time formation maintenance and cooperative payload transport without pre-defined waypoint assignments. Evaluated in ArduPilot-SITL with ROS and Gazebo Sim.
ArduPilot-SITL • Gazebo • Swarm Formation Control • Multi-Agent Systems
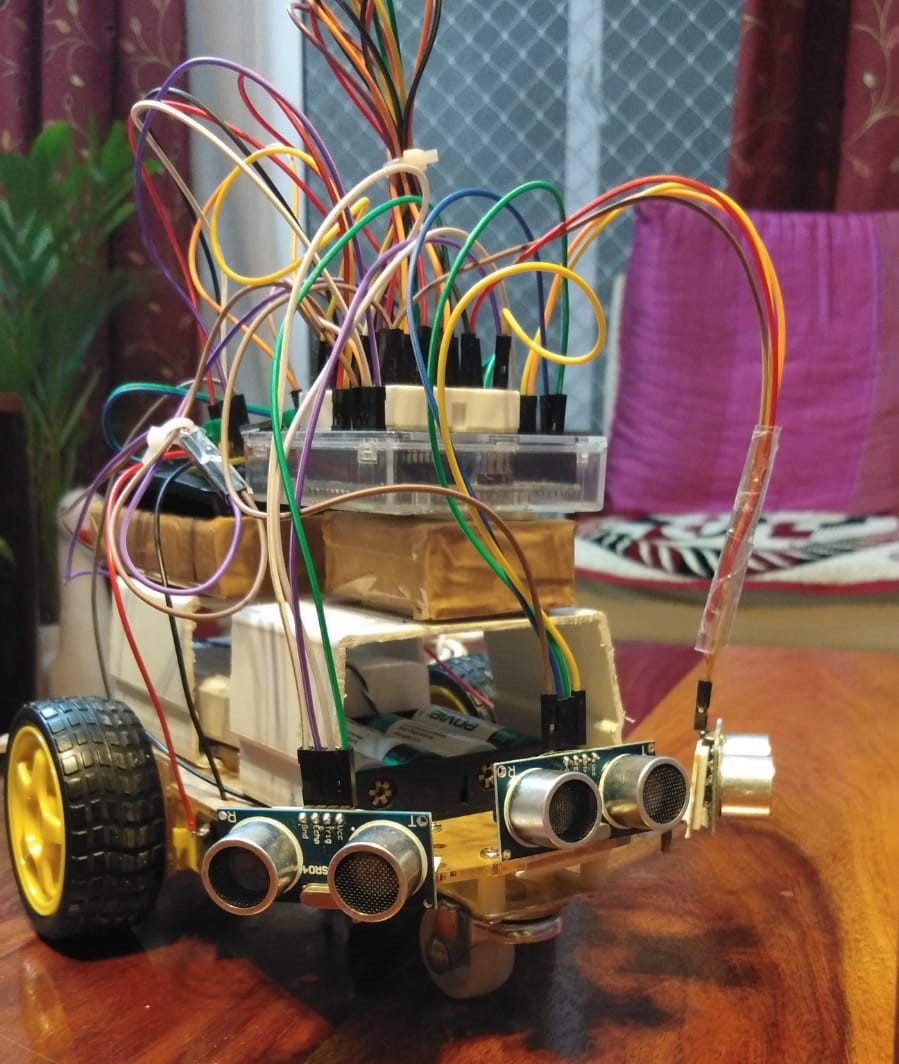
Built an autonomous 2WD robot with ML-based reactive navigation for indoor environments using a Raspberry Pi 3, Arduino Uno, and ultrasonic sensors. Trained a decision-tree model on robot-collected sensor data to perform real-time motion selection, achieving 97% accuracy on a held-out test dataset and validating performance in cluttered indoor environments.